Chat
- News and Announcements
- Announcements
- Product Introduction
- Account System
- User Profile and Relationship Chain
- Group Related
- Purchase Guide
- Demo Zone
- Chat Interaction (UI Included)
- TUIKit Library
- Integrating TUIKit
- Build Basic Interfaces
- Setting UI Styles
- Implementing Local Search
- Integrating Offline Push
- User Online Status
- Typing Status
- Message Read Receipt
- Message Reactions
- Message Quotation
- Message Translation
- Internationalization
- Adding Custom Messages
- Emoji & Stickers
- Custom UI components
- Conversation List(React)
- Video Call (UI Included)
- Additional Features(TUICallKit)
- Group Call
- Multi-Person Call
- Floating Window
- Beauty Effects (TUICallKit)
- Monitoring Call Status
- API Documentation(TUICallKit)
- Release Notes (TUICallKit)
- Push Service
- Manufacturer Channel
- Manufacturer Configuration
- Quick Integration
- Client APIs
- REST API
- Advanced Features
- Release Notes
- Desk
- Integration Guide
- Integration of UIKit(recommend)
- Integrating Agent End
- Desk related webhooks
- Admin Operation Manual
- Team Management
- More Practices
- No UI Integration
- Quick Start
- Login and Logout
- Message
- Message Overview
- Sending Message
- Receiving Message
- Historical Message
- Forwarding Message
- Modifying Message
- Message Inserting
- Deleting Message
- Clearing Messages
- Recalling Message
- Querying Message
- Group @ Message
- Targeted Group Message
- Notification Muting
- Message Extension
- Message Reaction
- Message Translation
- Message Pinning
- Conversation
- Conversation Overview
- Conversation List
- Getting Conversation
- Conversation Unread Count
- Pinning Conversation to the Top
- Deleting Conversation
- Conversation Draft
- Conversation Mark
- Conversation Group
- Group
- Group Management
- Group Member Management
- Group Member Profile
- Custom Group Attribute
- Group Counter
- Community Topic
- Community Management
- Permission Group
- User Profile and Relationship Chain
- Friend Management
- Follow Feature
- Cloud Search
- Cloud Search Messages
- Cloud Search Users
- Cloud Search Groups
- Cloud Search Group Members
- Local Search
- Searching for Message
- Searching for Friend
- Searching Group
- Searching for Group Member
- Signaling
- Signaling Management
- Server APIs
- RESTful APIs
- Message Related
- Send Message
- Historical Message
- Withdraw Message
- Read Receipt
- Message Extension
- Session Related
- Conversation List
- Session Unread Count
- Delete Session
- Group Related
- Group Management
- Group Member Management
- Group Member Information
- Group Custom Attributes
- Live Group Management
- Community Management
- Permission Group Management
- User Management
- Account Management
- User Information
- Friend Management
- Friend Lists
- Global Mute Management
- Operations Management
- Official Account Management
- Official Account Related
- Webhooks
- Operations Management Callbacks
- Online Status Webhooks
- Relationship Chain Webhooks
- One-to-One Message Webhooks
- Group Webhooks
- Chatbot Callbacks
- Webhooks related to the Official Account
- Console Guide
- Advanced Features
- Cloud Search Plugin
- Integration Guide
- Text Message Translation Plugin
- Integration Guide
- TUIPoll
- Integration Guide
- TUIGroupNote
- Integration Guide
- TUIConversationMark
- Integration Guide
- TUIConversationGroup
- Integration Guide
- FAQs
- SDK
- Security Compliance Certification
- Chat Policies

Android&iOS&Windows&Mac

Last updated: 2025-01-06 17:42:06
Overview
When sending a message, the user may want to switch to another chat window before finishing the message. The unfinished message can be saved through the
setConversationDraft API, so that the user can get back to it through the draftText field of the V2TIMConversation object and finish it.Note
1. A conversation draft can contain only text.
2. A conversation draft will be stored only in the local database and not on the server. Therefore, it cannot be synced across devices and will not be available after the application is uninstalled and reinstalled.
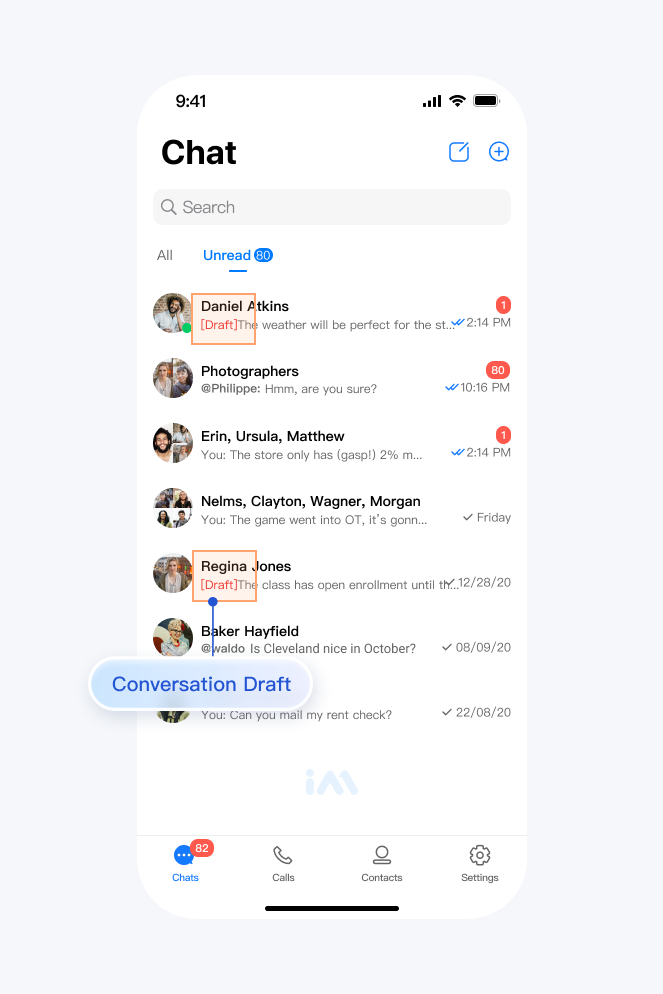
Effect
You can achieve the conversation draft effect shown in the figure below using this feature. Click on that conversation to enter the chat interface, and the draft content will automatically be filled into the input box:
Interface Description
Setting a Conversation Draft
If the
draftText parameter is empty, the draft is cleared.Sample code:
String conversationID = "conversationID";String draftText = "The draft text";V2TIMManager.getConversationManager().setConversationDraft(conversationID, draftText, new V2TIMCallback() {@Overridepublic void onSuccess() {Log.i("imsdk", "success");}@Overridepublic void onError(int code, String desc) {Log.i("imsdk", "failure, code:" + code + ", desc:" + desc);}});
V2TIMManager.shared.setConversationDraft(conversationID: "conversationID", draftText: "The draft text") {print("setConversationDraft succ")} fail: { code, desc inprint("setConversationDraft fail, \\(code), \\(desc)")}
NSString *conversationID = @"conversationID";NSString *draftText = "The draft text";[[V2TIMManager sharedInstance] setConversationDraft:conversationID draftText:draftText succ:^{NSLog(@"success");} fail:^(int code, NSString *desc) {NSLog(@"failure, code:%d, desc:%@", code, desc);}];
class Callback final : public V2TIMCallback {public:using SuccessCallback = std::function<void()>;using ErrorCallback = std::function<void(int, const V2TIMString&)>;Callback() = default;~Callback() override = default;void SetCallback(SuccessCallback success_callback, ErrorCallback error_callback) {success_callback_ = std::move(success_callback);error_callback_ = std::move(error_callback);}void OnSuccess() override {if (success_callback_) {success_callback_();}}void OnError(int error_code, const V2TIMString& error_message) override {if (error_callback_) {error_callback_(error_code, error_message);}}private:SuccessCallback success_callback_;ErrorCallback error_callback_;};V2TIMString conversationID = u8"conversationID";V2TIMString draftText = u8"The draft text";auto callback = new Callback;callback->SetCallback([=]() {// Set the conversation draft successfullydelete callback;},[=](int error_code, const V2TIMString& error_message) {// Failed to set the conversation draftdelete callback;});V2TIMManager::GetInstance()->GetConversationManager()->SetConversationDraft(conversationID, draftText,callback);
Was this page helpful?
You can also Contact Sales or Submit a Ticket for help.
Yes
No