即时通信 IM
- 动态与公告
- 产品简介
- Demo 专区
- 聊天互动(含 UI)
- TUIKit 界面库
- 接入离线推送
- 文本消息翻译
- 自定义 UI 组件
- Conversation List(React)
- 视频通话(含 UI)
- 更多特性(TUICallKit)
- 美颜特效(TUICallKit)
- 客户端 API(TUICallKit)
- 发布日志(TUICallKit)
- 推送服务(Push)
- 推送回调
- 智能客服
- 集成指引
- 含 UI 用户端集成(荐)
- 智能客服相关回调
- 无 UI 集成
- 消息相关
- 会话相关
- 群组相关
- 用户管理
- 云端搜索
- 本地搜索
- 服务端 API
- REST API
- 消息相关
- 会话相关
- 会话列表
- 删除会话
- 群组相关
- 社群管理
- 用户管理
- 第三方回调
- 运营管理相关回调
- 在线状态相关回调
- 群组系统相关回调
- 机器人相关回调
- 控制台指南
- 高级功能
- 文本消息翻译功能
- 集成指引
- 投票功能
- 接龙功能
- 集成指引
- 会话标记功能
- 集成指引
- 会话分组功能
- 集成指引

Android&iOS&Windows&Mac

最后更新时间:2025-01-03 10:45:13
功能描述
某些场景下,您可能希望发出去的消息只被对端在线时接收,即当接收者不在线时就不会感知到该消息。
您只需在
sendMessage 时,将参数 onlineUserOnly 设置为 true/YES,此时发送出去的消息跟普通消息相比,会有如下差异点:1. 不支持离线存储。如果接收方不在线就无法收到。
2. 不支持多端漫游。如果接收方在一台终端设备上一旦收到过该消息,无论是否已读,都不会在另一台终端上再次收到。
3. 不支持本地存储。无法在本地的、云端的历史消息中找回。
经典示例
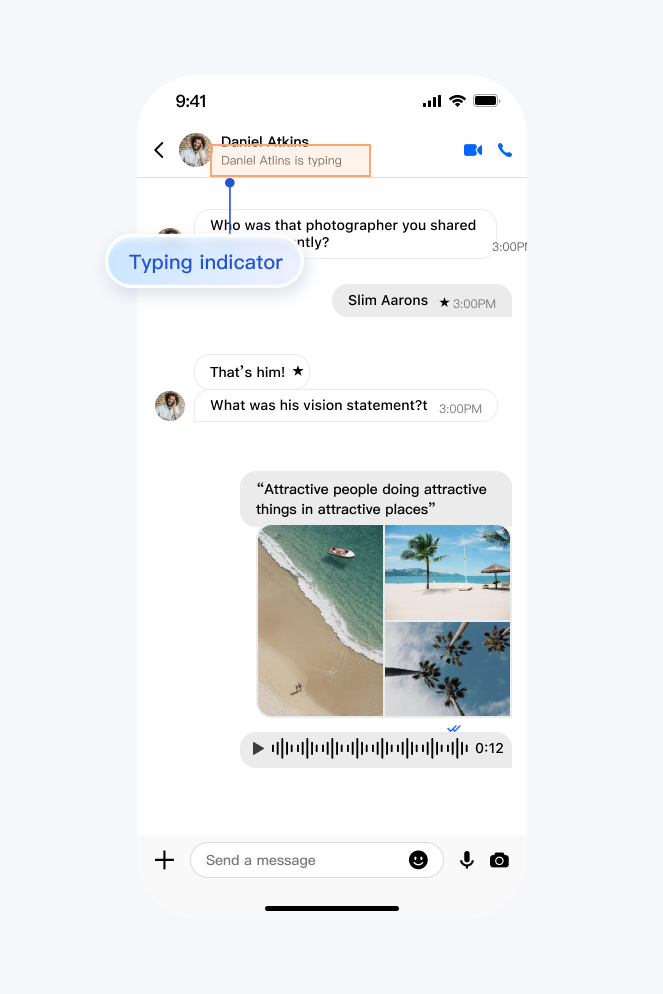
实现“对方正在输入”功能
在 C2C 单聊场景下,您可以通过
sendMessage (Java / Swift / Objective-C / C++) 发送指定的自定义在线消息,接收方收到该消息时判断是对端输入状态后,可以在 UI 界面展示 "对方正在输入",示例代码如下:
// 给 userA 发送 "正在输入" 的提示消息JSONObject jsonObject = new JSONObject();try {jsonObject.put("command", "textInput");} catch (JSONException e) {e.printStackTrace();}V2TIMMessage v2TIMMessage = V2TIMManager.getMessageManager().createCustomMessage(jsonObject.toString().getBytes());V2TIMManager.getMessageManager().sendMessage(v2TIMMessage, "userA", null, V2TIMMessage.V2TIM_PRIORITY_DEFAULT, true, v2TIMOfflinePushInfo, new V2TIMSendCallback<V2TIMMessage>() {@Overridepublic void onError(int code, String desc) {}@Overridepublic void onSuccess(V2TIMMessage v2TIMMessage) {}@Overridepublic void onProgress(int progress) {}});
// 给 userA 发送 "自己正在输入" 的提示消息let customStr = "{\\"command\\": \\"textInput\\"}"if let customData = customStr.data(using: .utf8) {if let message = V2TIMManager.shared.createCustomMessage(data: customData) {// 发送消息V2TIMManager.shared.sendMessage(message: message, receiver: "userID", groupID: nil, priority: .V2TIM_PRIORITY_DEFAULT, onlineUserOnly: true, offlinePushInfo: nil) { progress in// 处理发送进度} succ: {// 单聊自定义消息发送成功print("Custom message sent successfully.")} fail: { code, desc in// 单聊自定义消息发送失败print("Failed to send custom message: \\(code), \\(desc)")}}}
// 给 userA 发送 "自己正在输入" 的提示消息NSString *customStr = @"{\\"command\\": \\"textInput\\"}";NSData *customData = [customStr dataUsingEncoding:NSUTF8StringEncoding];V2TIMMessage *msg = [[V2TIMManager sharedInstance] createCustomMessage:customData];[[V2TIMManager sharedInstance] sendMessage:msg receiver:@"userA" groupID:nilpriority:V2TIM_PRIORITY_DEFAULT onlineUserOnly:YES offlinePushInfo:nil progress:^(uint32_t progress) {} succ:^{// 消息发送成功} fail:^(int code, NSString *msg) {// 消息发送失败}];
class SendCallback final : public V2TIMSendCallback {public:using SuccessCallback = std::function<void(const V2TIMMessage&)>;using ErrorCallback = std::function<void(int, const V2TIMString&)>;using ProgressCallback = std::function<void(uint32_t)>;SendCallback() = default;~SendCallback() override = default;void SetCallback(SuccessCallback success_callback, ErrorCallback error_callback,ProgressCallback progress_callback) {success_callback_ = std::move(success_callback);error_callback_ = std::move(error_callback);progress_callback_ = std::move(progress_callback);}void OnSuccess(const V2TIMMessage& message) override {if (success_callback_) {success_callback_(message);}}void OnError(int error_code, const V2TIMString& error_message) override {if (error_callback_) {error_callback_(error_code, error_message);}}void OnProgress(uint32_t progress) override {if (progress_callback_) {progress_callback_(progress);}}private:SuccessCallback success_callback_;ErrorCallback error_callback_;ProgressCallback progress_callback_;};// 给 userA 发送 "正在输入" 的提示消息std::string str{u8"{\\"command\\": \\"textInput\\"}"};V2TIMBuffer data = {reinterpret_cast<const uint8_t*>(str.data()), str.size()};V2TIMMessage message =V2TIMManager::GetInstance()->GetMessageManager()->CreateCustomMessage(data, description, extension);auto callback = new SendCallback{};callback->SetCallback([=](const V2TIMMessage& message) { delete callback; },[=](int error_code, const V2TIMString& error_message) { delete callback; },[=](uint32_t progress) {});V2TIMManager::GetInstance()->GetMessageManager()->SendMessage(message, "userA", {}, V2TIMMessagePriority::V2TIM_PRIORITY_DEFAULT, true, {}, callback);
实际上,要实现一个完整的 “对方正在输入...” 的提示,利用 SDK 发送在线消息只是一个小环节,还需要很多开发工作,例如:
用户界面监听及状态更新:在发送消息的输入框中添加事件监听器,检测用户何时开始输入。开始输入时,客户端更新用户的状态,例如“正在输入”。
向服务器发送状态:在合适的时机将用户的输入状态发送到服务器。
用户界面更新:根据接收到的输入状态,在接收端的用户界面上显示“对方正在输入”的提示,可以是一个文本提示、图标或动画。
考虑节流:为了减少不必要的状态更新和通信开销,可以设定一个时间间隔,在此间隔内只发送一次输入状态更新。
功能效果图如下所示: